

Bugbots could achieve big things
NSF-supported research is developing microrobots inspired by insects
In 1989, a pair of scientists posited sending swarms of robots, some as small as gnats, to explore other planets. Their paper, "Fast, Cheap and Out of Control: A Robot Invasion of the Solar System," was ahead of its time. It still is. But roboticists aren't done with the idea of tiny robots accomplishing something big.
The goal of many modern-day insect roboticists goes beyond space exploration to tiny autonomous machines that can improve life here on Earth. And their inspiration comes from the insect world — bumblebees, fruit flies and, yes, even gnats.
Why go so small?
For Sawyer Buckminster Fuller, entomologist and assistant professor of mechanical engineering at the University of Washington, Seattle, the better question is, why not?
"There are two big reasons I like to think about," said Fuller. "First, they're so small that they're inherently safe around people. You won't get an injury if an insect robot crashes into you. The other is, they're so small they use very little power."
Drone batteries typically drain after about 30 minutes, but insect-size robots could harvest energy readily available in the environment. Outdoors, they could regenerate on sunlight. Indoors, they could fly up and stick to a lightbulb or use the radio waves from a Wi-Fi access point.
What services could insect-inspired microbots provide? Crop pollination, search and rescue, and disaster surveillance. They could sniff out methane leaks in natural gas infrastructure, carbon monoxide in households, forest fires and agricultural pests. They could also be useful in high-resolution weather, climate and air quality monitoring. And, because it's prohibitively expensive to launch heavy items into space, robognats weighing just 10 or 15 milligrams — less than a grain of rice — could theoretically explore the solar system on the cheap.
AIR Lab bugbots
Fuller is director of the Autonomous Insect Robotics Laboratory, or AIR Lab, where he and his students brainstorm and tinker to engineer autonomous robots that resemble bees, flies and gnats, among other bugbots.
Scaling down robotics poses serious challenges, including finding or devising sensor and controller hardware teeny and lightweight enough for stable flight and navigation. Aircraft, including drones, navigate with gyroscopes, but gyroscopes are too heavy and power-hungry — even the lightest ones weigh 15 milligrams.
With support from the U.S. National Science Foundation, Fuller and his students came up with a breakthrough flight control and wind sensing system using accelerometers. An accelerometer measures the airspeed of a flying object by sensing drag-induced acceleration. It is more efficient than a gyroscope and can weigh as little as 2 milligrams. The idea was inspired by Fuller's observations that flies use their antennae to sense the wind to control their flight. The team's research appears in a recent issue of Science Robotics.
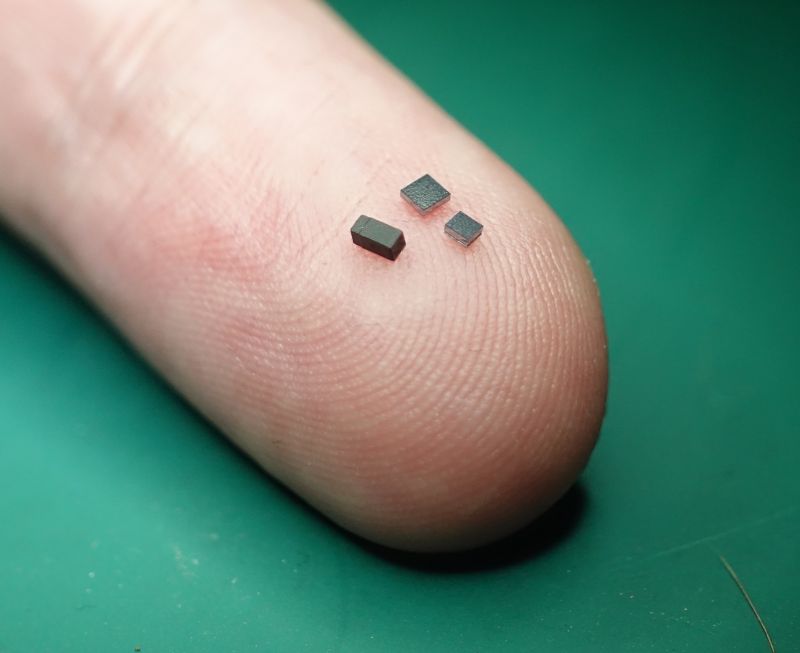
The lab's sensor suite also includes a miniature lightweight optic flow sensor and microprocessor to estimate altitude and wind strength. Together, the suite is about 20 times lighter and uses about 100 times less power than the avionics system on the smallest, palm-size drone able to hover by itself.
The AIR Lab has gone from successful simulations to building a 100-milligram robofly for real-world experiments. In a year or so, once they get the robofly hovering autonomously, they expect to start tackling the robognat. Their bugbots even resemble the insects that inspired them, with black carbon-fiber bodies and flapping wings made of a clear, thin polyester material kept rigid by carbon-fiber "veins."
Harvard's RoboBee
Other scientists are iterating on nature-inspired robotics, including an interdisciplinary research team that set out in 2009 to construct the smallest flying robot modeled after a bee.
Work on the RoboBee began at the Harvard John A. Paulson School of Engineering and Applied Sciences and the Harvard Wyss Institute for Biologically Inspired Engineering, led by Robert J. Wood. NSF funded the research through Expeditions in Computing, a program to support long-term, multi-institutional research with the potential to transform computer and information science and engineering.
Since its start, NSF has awarded over $13 million to six different universities contributing to the RoboBee effort, with the undertaking requiring the combined efforts of strategically constructed flight apparatuses, power systems, circuitry and control algorithms. From this work, six U.S. patents have been granted to date.
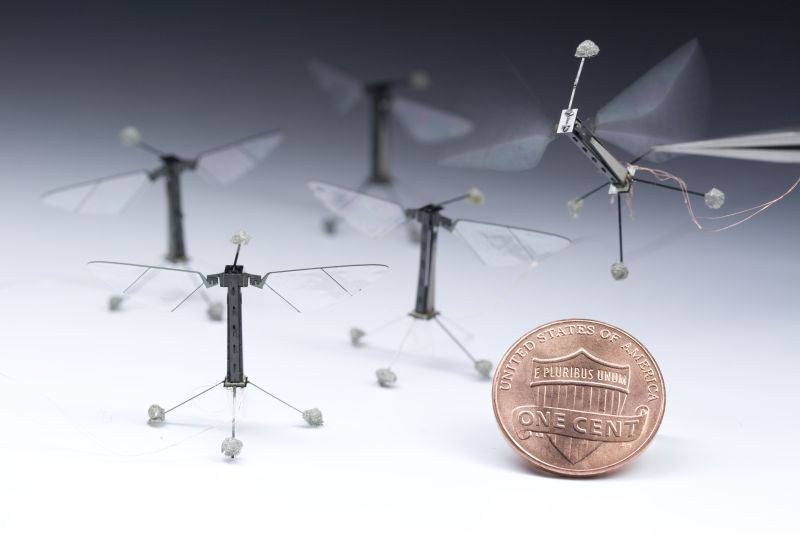
In 2012, the first controlled flight of an insect-scale robot, tethered to a power source, was conducted. In 2016, researchers showed that the microrobot could stick to walls and perch to save energy like flying creatures in nature. In 2017, a new RoboBee was shown to be able to swim and burst out of the water into the air to fly, making it the first microrobot to repeatedly move in and out of complex environments.
About a decade after the project began, in 2018, the team succeeded in pushing the limits of robotics to build the lightest vehicle to achieve sustained untethered flight. The solar-powered mechanical insect weighed in at under 90 milligrams, about the weight of a pumpkin seed.
The small scale of these robots comes with numerous challenges, including the weight of power sources and the density of water compared to the lightweight flier, as well as the difficult and time-consuming nature of assembling these microrobots. As the project progressed, many RoboBee prototypes and their components had to be constructed, and the researchers needed a way to start manufacturing RoboBees faster and more consistently.
The solution was found not in nature, but in the arts. Drawing inspiration from origami and children’s pop-up books, in 2011 the team developed a new method of layering and folding robotics components to efficiently manufacture microrobots without compromising on their complexity: printed circuit microelectromechanical systems.
In this process, robots’ components are first carved into a 2D sheet and then popped out into its 3D structure. This same technology was applied to a cockroach-inspired robot, the Harvard Ambulatory Microrobot, or HAMR, and in 2020 the team used the pop-up method to build a miniaturized version, HAMR-JR. With a body length just over the width of a U.S. penny and a crawling speed of 14 body lengths-per-second, the speedy and dexterous bot became one of the smallest and fastest microbots and demonstrated that the pop-up manufacturing method allows robotic designs to easily change in scale while maintaining their basic design.
But these advances go beyond the bee. Today, Wood envisions this technology being harnessed by surgical robotics. Robot-assisted surgeries are common practice and have allowed numerous surgical operations to become less invasive, leaving less prominent scars, speeding up recovery and decreasing the likelihood of infection.
This pop-up microelectronics method could enable surgical robot manufacturing to decrease significantly in size, opening the human body to new possibilities for surgical techniques that could improve treatments and save lives.
About the Authors
Tamara Dietrich
Senior Technical Writer/Editor
Tamara Dietrich is a Senior Technical Writer/Editor at NSF in the Office of the Director, Office of Legislative and Public Affairs. She is NSF’s Social Media Writer, with expertise in science and environment writing. Before coming to NSF, Tamara was an award-winning journalist, columnist and editor at numerous daily newspapers. Her work has appeared in The Washington Post, Los Angeles Times, Chicago Tribune, Virginian-Pilot, U.S. News & World Report, phys.org and other publications. She is the author of a novel, “The Hummingbird’s Cage,” published by Penguin Random House in the U.S. and by the Orion Publishing Group in the U.K. The book was optioned by a British film company. She is also lead author of a nonfiction account of the first 100 years of NASA Langley Research Center, “The Unknown and Impossible: How a research facility in Virginia mastered the air and conquered space.” Outside of science, Tamara enjoys photography, poetry, road trips and international travel.
Heather Masson-Forsythe
AAAS Science and Technology Policy Fellow
After completing her Ph.D. in Biochemistry & Biophysics, Heather Masson-Forsythe joined the National Science Foundation as an American Association for the Advancement of Science (AAAS) Science and Technology Policy Fellow in the Directorate for Computer and Information Science and Engineering (CISE), Office of the Assistant Director.


